

scattered_gaussian_fitting.cpp File Reference
Example of fitting a Gaussian image model to visibility amplitude data. More...
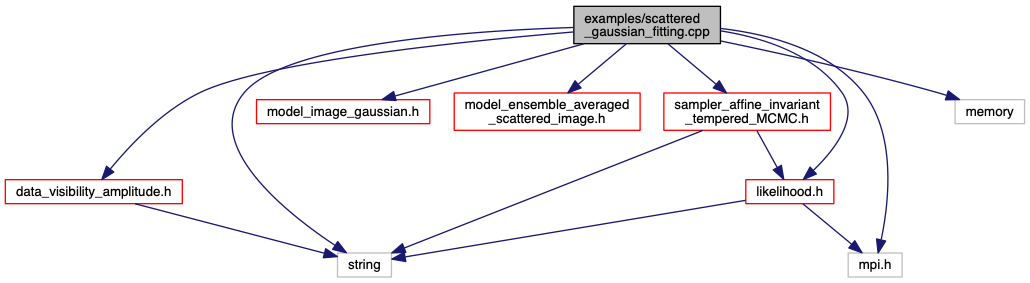
#include "data_visibility_amplitude.h"#include "model_image_gaussian.h"#include "model_ensemble_averaged_scattered_image.h"#include "likelihood.h"#include "sampler_affine_invariant_tempered_MCMC.h"#include <mpi.h>#include <memory>#include <string>
Include dependency graph for scattered_gaussian_fitting.cpp:
Functions | |
| int | main (int argc, char *argv[]) |
Detailed Description
#include "data_visibility_amplitude.h"
#include "data_closure_phase.h"
#include "model_image_multigaussian.h"
#include "sampler_affine_invariant_tempered_MCMC.h"
#include <mpi.h>
#include "utils.h"
int main(int argc, char* argv[])
{
MPI_Init(&argc, &argv);
int world_rank;
MPI_Comm_rank(MPI_COMM_WORLD, &world_rank);
std::cout << "MPI Initiated - Processor Node: " << world_rank << " executing main." << std::endl;
//RG: SIMULATED DATA PROVIDED BY MF_FE_WG CHALLENGE 2
Themis::data_visibility_amplitude SIM_VM_DATA(Themis::utils::global_path("eht_data/mf_fe_wg_challenge2_vm.txt"));
Themis::data_closure_phase SIM_CP_DATA(Themis::utils::global_path("eht_data/mf_fe_wg_challenge2_cp.txt"));
// Choose the model to compare
Themis::model_image_multigaussian image(5);
// RG: INTRODUCE NEW PARAMETERS N:Nr of Gaussian components, N-1
// positions, rest the same as before for each Gaussian
// Container of base prior class pointers
double image_scale = 3 * 43.e-6 / 3600. /180. * M_PI / (std::sqrt(8.*std::log(2.))) ;
std::vector<Themis::prior_base*> P;
// P.push_back(new Themis::prior_linear(1.,5.)); // Nr of Gaussian components
for (size_t n=1; n<5; n++) {
}
std::vector<double> means, ranges;
means.push_back(1.0); // flux
means.push_back(0.5*image_scale); // width
means.push_back(0.0); // x_i
means.push_back(0.0); // y_i
ranges.push_back(1.0); // flux
ranges.push_back(0.5*image_scale); // width
ranges.push_back(0.0); // x_i
ranges.push_back(0.0); // y_i
for (size_t i=1; i<5; i++) { // for each Gaussian component
means.push_back(1.0); // flux
means.push_back(0.5*image_scale); // width
means.push_back(0.0); // x_i
means.push_back(0.0); // y_i
ranges.push_back(1.0); // flux
ranges.push_back(0.5*image_scale); // width
ranges.push_back(image_scale); // x_i
ranges.push_back(image_scale); // y_i
}
means.push_back(0.);
ranges.push_back(1e-6);
// vector to hold the name of variables, if the names are provided it would be added
// as the header to the chain file
std::vector<std::string> var_names;
// var_names.push_back("Nr Gaussians");
var_names.push_back("Flux_1");var_names.push_back("$\\sigma_1$");var_names.push_back("$x_1$");var_names.push_back("$y_1$");
var_names.push_back("Flux_2");var_names.push_back("$\\sigma_2$");var_names.push_back("$x_2$");var_names.push_back("$y_2$");
var_names.push_back("Flux_3");var_names.push_back("$\\sigma_3$");var_names.push_back("$x_3$");var_names.push_back("$y_3$");
var_names.push_back("Flux_4");var_names.push_back("$\\sigma_4$");var_names.push_back("$x_4$");var_names.push_back("$y_4$");
var_names.push_back("Flux_5");var_names.push_back("$\\sigma_5$");var_names.push_back("$x_5$");var_names.push_back("$y_5$");
var_names.push_back("PA");
// Applying the coordinate transformation on the initial values
// RG:REMOVE
Themis::transform_none Trans;
for(unsigned int i = 0 ; i < means.size(); i++)
// for(unsigned int i = 0 ; i < 20; i++)
{
means[i] = Trans.forward(means[i]);
ranges[i] = Trans.forward(ranges[i]);
}
// Set the variable transformations
std::vector<Themis::transform_base*> T;
for (size_t i=0; i<21; i++ )
T.push_back(new Themis::transform_none());
// T.push_back(new Themis::transform_none());
// Set the likelihood functions
std::vector<Themis::likelihood_base*> L;
L.push_back(new Themis::likelihood_marginalized_visibility_amplitude(SIM_VM_DATA,image));
// Closure Phases Likelihoods
// double sigma_phi = 3.86;
double sigma_phi = 1e-5; // in this data set the sigma on CP is not global, should use what's in the data
// 2009
L.push_back(new Themis::likelihood_marginalized_closure_phase(SIM_CP_DATA,image,sigma_phi));
// Set the weights for likelihood functions
std::vector<double> W(L.size(), 1.0);
// Make a likelihood object
Themis::likelihood L_obj(P, T, L, W);
// Create a sampler object, here the PT MCMC
Themis::sampler_affine_invariant_tempered_MCMC MC_obj(42+world_rank);
// Generate a chain
int Number_of_chains = 128; // Number of walkers
int Number_of_temperatures = 4;
int Number_of_processors_per_lklhd=1;
int Number_of_steps = 1e6; // Total number of MCMC steps before quitting
int Temperature_stride = 50; // Communicate among walkers lessons learned about the sampled parameter space every 50 MCMC steps
int Chi2_stride = 100; // Output chi^2 file every 20 MCMC steps
// Parallelization settings
MC_obj.set_cpu_distribution(Number_of_temperatures, Number_of_chains, Number_of_processors_per_lklhd);
// Sample the parameter space
MC_obj.run_sampler(L_obj, Number_of_steps, Temperature_stride, Chi2_stride,
"Chain-Ngaussians.dat", "Lklhd-Ngaussians.dat", "Chi2-Ngaussians.dat",
means, ranges, var_names, false);
//Finalize MPI
MPI_Finalize();
return 0;
}
- Date
- Apr 2017
This example illustrates how to generate a Gaussian image model, include scattering to the intrinsic model image, read-in visibility amplitude data (as also shown in reading_data.cpp), and fitting the model to the eht data. The model can take full advantage of the analytically known visibility amplitudes thus making this test really fast.
#include "data_visibility_amplitude.h"
#include "model_image_gaussian.h"
#include "model_ensemble_averaged_scattered_image.h"
#include "likelihood.h"
#include "sampler_affine_invariant_tempered_MCMC.h"
#include <mpi.h>
#include <memory>
#include <string>
#include <string>
int main(int argc, char* argv[])
{
MPI_Init(&argc, &argv);
int world_rank;
MPI_Comm_rank(MPI_COMM_WORLD, &world_rank);
std::cout << "MPI Initiated - Processor Node: " << world_rank << " executing main." << std::endl;
// Read in visibility amplitude data from 2007 and 2009
Themis::data_visibility_amplitude d2007("../../eht_data/VM_2007_100.d");
d2007.add_data("../../eht_data/VM_2007_101.d");
Themis::data_visibility_amplitude d2009_095("../../eht_data/VM_2009_095.d");
Themis::data_visibility_amplitude d2009_096("../../eht_data/VM_2009_096.d");
Themis::data_visibility_amplitude d2009_097("../../eht_data/VM_2009_097.d");
// Choose the model to compare
// Themis::model_image_gaussian image;
Themis::model_image_gaussian intrinsic_image;
Themis::model_ensemble_averaged_scattered_image image(intrinsic_image);
// Container of base prior class pointers
double image_scale = 3 * 43.e-6 / 3600. /180. * M_PI / (std::sqrt(8.*std::log(2.))) ;
std::vector<Themis::prior_base*> P;
std::vector<double> means, ranges;
means.push_back(1.0);
means.push_back(0.5*image_scale);
means.push_back(0.5*image_scale);
means.push_back(0.25*M_PI);
ranges.push_back(1.0e-6);
ranges.push_back(image_scale);
ranges.push_back(image_scale);
ranges.push_back(0.5*M_PI);
// vector to hold the name of variables, if the names are provided it would be added
// as the header to the chain file
std::vector<std::string> var_names;
// Applying the coordinate transformation on the initial values
Themis::transform_none Trans;
for(unsigned int i = 0 ; i < means.size(); i++)
{
means[i] = Trans.forward(means[i]);
ranges[i] = Trans.forward(ranges[i]);
}
// Set the variable transformations
std::vector<Themis::transform_base*> T;
T.push_back(new Themis::transform_none());
T.push_back(new Themis::transform_none());
T.push_back(new Themis::transform_none());
T.push_back(new Themis::transform_none());
// Set the likelihood functions
std::vector<Themis::likelihood_base*> L;
L.push_back(new Themis::likelihood_marginalized_visibility_amplitude(d2007,image));
L.push_back(new Themis::likelihood_marginalized_visibility_amplitude(d2009_095,image));
L.push_back(new Themis::likelihood_marginalized_visibility_amplitude(d2009_096,image));
L.push_back(new Themis::likelihood_marginalized_visibility_amplitude(d2009_097,image));
// Set the weights for likelihood functions
std::vector<double> W(L.size(), 1.0);
// Make a likelihood object
Themis::likelihood L_obj(P, T, L, W);
// Create a sampler object, here the PT MCMC
Themis::sampler_affine_invariant_tempered_MCMC MC_obj(42+world_rank);
// Generate a chain
int Number_of_chains = 128;
int Number_of_temperatures = 5;
int Number_of_processors_per_lklhd=1;
int Number_of_steps = 3000;
int Temperature_stride = 50;
int Chi2_stride = 20;
MC_obj.set_cpu_distribution(Number_of_temperatures, Number_of_chains, Number_of_processors_per_lklhd);
MC_obj.run_sampler(L_obj, Number_of_steps, Temperature_stride, Chi2_stride,
"Chain-Gaussian.dat", "Lklhd-Gaussian.dat", "Chi2-Gaussian.dat",
means, ranges, var_names, false);
//Finalize MPI
MPI_Finalize();
return 0;
}